
Magnetinduktsiooni vektori suund vastavalt käereeglile. Magnetväli
Pikka aega uuriti elektri- ja magnetvälju eraldi. Kuid 1820. aastal avastas Taani teadlane Hans Christian Oersted füüsika loengus, et magnetnõel pöördub voolu kandva juhi lähedal (vt joonis 1). See tõestas voolu magnetilist mõju. Pärast mitmete katsete läbiviimist avastas Oersted, et magnetnõela pöörlemine sõltus juhi voolu suunast.
Riis. 1. Oerstedi eksperiment
Et kujutleda põhimõtet, mille järgi magnetnõel vooluga juhi lähedal pöörleb, võtke arvesse vaadet juhi otsast (vt joonis 2, vool on suunatud joonisele, - jooniselt), mille lähedal on paigaldatud magnetnõelad. Pärast voolu läbimist joonduvad nooled teatud viisil üksteise vastaspoolustega. Kuna magnetnooled reastuvad magnetjoonte puutujaga, on vooluga sirge juhi magnetjooned ringid ja nende suund sõltub juhi voolu suunast.

Riis. 2. Magnetnõelte asukoht vooluga sirge juhi lähedal
Voolu juhtiva juhtme magnetjoonte selgemaks demonstreerimiseks võib läbi viia järgmise katse. Kui raudviilud valatakse ümber voolu juhtiva juhtme, siis mõne aja pärast magnetiseeritakse juhtme magnetväljas viilud ja asetsevad ringid, mis ümbritsevad juhti (vt joonis 3).

Riis. 3. Rauaviilide paigutus voolu juhtiva juhtme ümber ()
Voolujuhti lähedal asuvate magnetjoonte suuna määramiseks on olemas kere reegel(parempoolne kruvireegel) - kui kruvid juhtme voolu suunas, siis sangkangi käepideme pöörlemissuund näitab voolu magnetvälja joonte suunda (vt joonis 4).

Riis. 4. Gimleti reegel ()
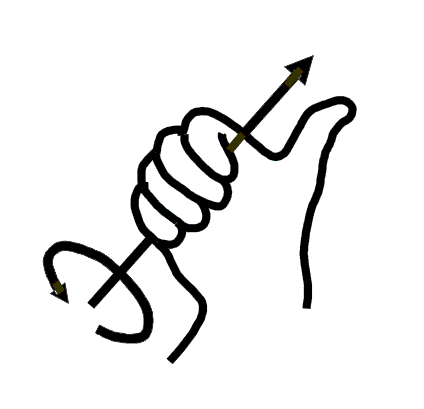
Võite ka kasutada parema käe reegel- kui suunate parema käe pöidlaga juhi voolu suunas, siis neli painutatud sõrme näitavad voolu magnetvälja jõujoonte suunda (vt joonis 5).

Riis. 5. Parema käe reegel ()
Mõlemad reeglid annavad sama tulemuse ja neid saab kasutada magnetvälja joonte suunalise voolu suuna määramiseks.
Olles avastanud magnetvälja tekkimise nähtuse voolu kandva juhi lähedal, saatis Oersted oma uurimistöö tulemused enamikule Euroopa juhtivatest teadlastest. Pärast nende andmete saamist alustas prantsuse matemaatik ja füüsik Ampere oma katsete seeriat ja demonstreeris mõne aja pärast avalikkusele oma kogemusi kahe paralleelse juhi ja voolu koosmõjust. Amper tuvastas, et kui elektrivool liigub ühes suunas läbi kahe paralleelse juhi, siis sellised juhid tõmbavad (vt joonis 6 b), kui vool liigub vastassuundades, siis juhid tõrjuvad (vt joonis 6 a).

Riis. 6. Ampere'i eksperiment ()
Oma katsete põhjal tegi Ampere järgmised järeldused:
1. Magneti või juhi või elektriliselt laetud liikuva osakese ümber on magnetväli.
2. Selles väljas liikuvale laetud osakesele mõjub magnetväli teatud jõuga.
3. Elektrivool on laetud osakeste suunatud liikumine, seega mõjub voolu juhtivale juhile magnetväli.
Joonisel 7 on kujutatud traadi ristkülikut, mille voolu suund on näidatud nooltega. Kasutades ristküliku reeglit, tõmmake üks magnetjoon ristküliku külgede lähedale, näidates selle suunda noolega.

Riis. 7. Probleemi illustratsioon
Lahendus
Kruvime kujuteldava ristküliku (juhtiva raami) külgedele voolu suunas.
Raami parema külje lähedal väljuvad magnetjooned juhist vasakul olevast mustrist ja sisenevad sellest paremal asuvale mustri tasapinnale. Seda näitab noolereegel täpi kujul juhist vasakul ja ristiga paremal (vt joonis 8).
Samamoodi määrame raami teiste külgede lähedal asuvate magnetjoonte suuna.

Riis. 8. Probleemi illustratsioon
Ampere'i katse, mille käigus paigaldati ümber mähise magnetnooled, näitas, et kui vool voolas läbi mähise, paigaldati solenoidi otstesse suunduvad nooled erinevate poolustega mööda mõttelisi jooni (vt joonis 9). See nähtus näitas, et voolu juhtiva pooli läheduses on magnetväli ja ka seda, et solenoidil on magnetpoolused. Kui muudate mähise voolu suunda, pöörduvad magnetnõelad vastupidi.

Riis. 9. Ampere eksperiment. Magnetvälja teke vooluga mähise lähedal
Vooluga mähise magnetpooluste määramiseks kasutatakse seda solenoidi parema käe reegel(vt. joon. 10) - kui kinnitate solenoidi parema käe peopesaga, näidates nelja sõrmega pööretel voolu suunas, siis pöial näitab magnetvälja magnetvälja joonte suunda solenoidi sees, et on selle põhjapoolusel. See reegel võimaldab määrata mähise keerdude voolu suuna selle magnetpooluste asukoha järgi.

Riis. 10. Parema käe reegel voolu juhtiva solenoidi jaoks
Määrake mähise voolu suund ja poolused vooluallika juures, kui voolu läbimisel pooli ilmuvad joonisel 11 näidatud magnetpoolused.

Riis. 11. Probleemi illustratsioon
Lahendus
Solenoidi parema käe reegli järgi haarame mähist nii, et pöial on suunatud selle põhjapoolusele. Neli painutatud sõrme näitavad voolu suunda mööda juhti, seetõttu on vooluallika parempoolus positiivne (vt joonis 12).

Riis. 12. Probleemi illustratsioon
Selles õppetükis uurisime magnetvälja tekkimise nähtust vooluga sirge juhi ja vooluga pooli (solenoidi) läheduses. Uuriti ka nende väljade magnetjoonte leidmise reegleid.
Bibliograafia
- A.V. Perõškin, E.M. Gutnik. Füüsika 9. - Bustard, 2006.
- G.N. Stepanova. Füüsika ülesannete kogu. - M.: Haridus, 2001.
- A. Fadeeva. Füüsika kontrolltööd (7. - 11. klass). - M., 2002.
- V. Grigorjev, G. Mjakišev Jõud looduses. - M.: Nauka, 1997.
Kodutöö

- Interneti-portaal Clck.ru ().
- Interneti-portaal Class-fizika.narod.ru ().
- Internetiportaal Festival.1september.ru ().
- Paljudel neist juhtudest on lisaks üldisele sõnastusele, mis võimaldab määrata vektorkorrutise suuna või aluse orientatsiooni üldiselt, reegli spetsiaalsed sõnastused, mis on iga konkreetse olukorra jaoks eriti hästi kohandatud (kuid palju vähem üldine).
Põhimõtteliselt peetakse telgvektori kahest võimalikust suunast ühe valikut reeglina puhtalt tingimuslikuks, kuid see peaks toimuma alati ühtemoodi, et märk ei läheks arvutuste lõpptulemuses segamini. Selleks on selle artikli teemaks olevad reeglid (need võimaldavad teil alati jääda samale valikule).
Üldine (peamine) reegel
Peamine reegel, mida saab kasutada nii klambri (kruvi) reegli versioonis kui ka parema käe reegli versioonis, on aluste ja vektorkorrutise (või isegi ühe reegli) suuna valimise reegel. kaks, kuna üks on teise kaudu otseselt määratud). See on oluline, sest põhimõtteliselt piisab kõigi muude reeglite asemel kasutamiseks kõigil juhtudel, kui tead vaid tegurite järjekorda vastavates valemites.
Reegli valimine vektorkorrutise positiivse suuna määramiseks ja jaoks positiivne alus(koordinaatsüsteemid) kolmemõõtmelises ruumis on omavahel tihedalt seotud.
Vasak (joonisel vasakul) ja parem (parem) Descartes'i koordinaatsüsteemid (vasak ja parem alus). Seda peetakse üldiselt positiivseks ja vaikimisi kasutatakse õiget (see on üldtunnustatud konventsioon, kuid kui erilised põhjused sunnivad sellest kokkuleppest kõrvale kalduma, tuleks see selgesõnaliselt välja öelda)
Mõlemad reeglid on põhimõtteliselt puhtalt kokkuleppelised, kuid üldiselt aktsepteeritakse (vähemalt juhul, kui pole selgesõnaliselt öeldud vastupidist) eeldada, ja see on üldtunnustatud kokkulepe, et positiivne on õige alus, ja vektori korrutis on defineeritud nii, et positiivse ortonormaalse aluse jaoks e → x , e → y , e → z (\displaystyle (\vec (e))_(x),(\vec (e))_(y),(\vec (e))_(z))(ristkülikukujuliste Descartes'i koordinaatide alus ühikskaalaga piki kõiki telgesid, mis koosneb ühikvektoritest piki kõiki telgesid), kehtib järgmine:
e → x × e → y = e → z , (\displaystyle (\vec (e))_(x)\times (\vec (e))_(y)=(\vec (e))_(z ))kus kaldus rist tähistab vektori korrutamist.
Vaikimisi kasutatakse positiivseid (ja seega õigeid) aluseid. Põhimõtteliselt on tavaks kasutada vasakpoolseid aluseid peamiselt siis, kui parema kasutamine on väga ebamugav või täiesti võimatu (näiteks kui meil peegeldub peeglis õige alus, siis peegeldus kujutab vasakut alust ja midagi ei saa teha sellest).
Seetõttu on vektorkorrutise reegel ja positiivse aluse valimise (konstrueerimise) reegel vastastikku kooskõlas.
Neid saab sõnastada järgmiselt:
Risttoote jaoks
Risttoote rõngastikli (kruvi) reegel: Kui joonistate vektorid nii, et nende alguspunktid langevad kokku ja pöörate esimest faktorivektorit kõige lühemat teed pidi teise faktori vektori poole, siis keeratakse samamoodi pöörlev kinnitus (kruvi) korrutisvektori suunas. .
Variant päripäeva vektorkorrutise jaoks: Kui me joonistame vektorid nii, et nende alguspunktid langevad kokku ja pöörame esimest vektortegurit kõige lühemat teed pidi teise vektorteguri poole ja vaatame küljelt nii, et see pöörlemine on meie jaoks päripäeva, siis vektorkorrutis on suunatud eemale. meilt (kella sisse kruvitud ).
Parema käe reegel risttoote jaoks (esimene võimalus):
Kui joonistada vektorid nii, et nende alguspunktid langevad kokku ja pöörata esimest faktorivektorit kõige lühemat teed pidi teise faktorivektorini ning parema käe neli sõrme näitavad pöörlemissuunda (nagu kataks pöörlevat silindrit), siis väljaulatuv pöial näitab korrutisvektori suunda.
Parema käe reegel risttoote jaoks (teine võimalus):

A → × b → = c → (\displaystyle (\vec (a))\times (\vec (b))=(\vec (c)))
Kui joonistada vektorid nii, et nende alguspunkt langeb kokku ja parema käe esimene (pöidla) sõrm on suunatud piki esimest faktorivektorit, teine (nimetissõrm) mööda teist faktorivektorit, siis kolmas (keskmine) näitab ( ligikaudu) korrutisvektori suund (vt. joonis).
Elektrodünaamikaga seoses on vool (I) suunatud piki pöialt, magnetinduktsiooni vektor (B) piki nimetissõrme ja jõud (F) suunatakse piki keskmist sõrme. Mnemoonilises plaanis on reeglit lihtne meeles pidada lühendi FBI (inglise keelest tõlgitud force, induction, current ehk Federal Bureau of Investigation (FBI)) ja püstoli meenutava sõrmede asendi järgi.
Aluste jaoks
Kõiki neid reegleid saab aluste orientatsiooni määramiseks loomulikult ümber kirjutada. Kirjutame neist ümber ainult kaks: Parema käe reegel aluse jaoks:
x, y, z - parempoolne koordinaatsüsteem.
Kui aluses e x , e y , e z (\displaystyle e_(x), e_(y), e_(z))(koosneb vektoritest piki telge x, y, z) suunake parema käe esimene (pöidla) sõrm piki esimest baasvektorit (st piki telge x), teine (indeks) - piki teist (see tähendab piki telge). y) ja kolmas (keskmine) suunatakse (ligikaudu) kolmanda suunas (mööda z), siis on see õige alus(nagu pildilt selgus).
Aluse (kruvi) reegel: Kui keerata sõõri ja vektoreid nii, et esimene alusvektor kalduks võimalikult lühikesel viisil teise poole, siis keeratakse sang (kruvi) kolmanda alusvektori suunas, kui see on õige alus.
- Kõik see vastab loomulikult tasapinnal koordinaatide suuna valimise tavapärase reegli laiendusele (x - paremale, y - üles, z - meie poole). Viimane võib olla veel üks mnemooniline reegel, mis on põhimõtteliselt võimeline asendama kere, parema käe vms reeglit (samas nõuab selle kasutamine mõnikord teatud ruumilist kujutlusvõimet, kuna peate tõmmatud koordinaate mõtteliselt pöörama tavapärasel viisil kuni need langevad kokku alusega , mille orientatsiooni tahame kindlaks teha ja mida saab kasutada mis tahes viisil).
Kere (kruvi) reegli või parema käe reegli formulatsioonid erijuhtudeks
Eespool oli mainitud, et kõik reegli või parema käe reegli (ja teiste sarnaste reeglite) erinevad sõnastused, sealhulgas kõik allpool mainitud, ei ole vajalikud. Neid pole vaja teada, kui tead (vähemalt mõne variandi puhul) ülalkirjeldatud üldreeglit ja tead vektorkorrutist sisaldavate valemite tegurite järjekorda.
Kuid paljud allpool kirjeldatud reeglid on hästi kohandatud nende rakendamise erijuhtudele ja seetõttu võib nendel juhtudel vektorite suuna kiireks määramiseks olla väga mugav ja lihtne.
Parempoolne või kruvireegel mehaaniliseks pöörlemiskiiruseks
Parempoolne või kere (kruvi) reegel nurkkiiruse jaoks
Parema käe või kere (kruvi) reegel jõudude momendi jaoks
M → = ∑ i [ r → i × F → i ] (\displaystyle (\vec (M))=\sum _(i)[(\vec (r))_(i)\times (\vec (F) ))_(i)])(Kus F → i (\displaystyle (\vec (F))_(i))- rakendatud jõud i- keha punkt, r → i (\displaystyle (\vec (r))_(i))- raadiuse vektor, × (\displaystyle \times)- vektori korrutamise märk),
reeglid on samuti üldiselt sarnased, kuid sõnastame need selgesõnaliselt.
Kinnituse (kruvi) reegel: Kui keerate kruvi (kinnitust) suunas, kuhu jõud kipuvad keha keerama, keerab kruvi sisse (või keerab lahti) suunas, kuhu nende jõudude moment on suunatud.
Parema käe reegel: Kui kujutame ette, et võtsime keha paremasse kätte ja üritame seda pöörata suunas, kuhu neli sõrme näitavad (keha pöörata püüdvad jõud on suunatud nende sõrmede suunas), siis väljaulatuv pöial osutab suunas, kuhu pöördemoment on suunatud (nende tugevuse hetk).
Magnetostaatikas ja elektrodünaamikas parema käe ja kruvi (kruvi) reegel
Magnetilise induktsiooni jaoks (Biot-Savart seadus)
Kinnituse (kruvi) reegel: Kui gimleti (kruvi) translatsioonilise liikumise suund langeb kokku juhi voolu suunaga, siis katku käepideme pöörlemissuund langeb kokku selle voolu tekitatud välja magnetilise induktsiooni vektori suunaga.
Parema käe reegel: Kui kinnitate juhi parema käega nii, et väljaulatuv pöial näitab voolu suunda, näitavad ülejäänud sõrmed selle voolu tekitatud välja magnetilise induktsiooni joonte suunda, mis ümbritsevad juhti ja seega ka suunda. magnetinduktsioonivektorist, mis on suunatud kõikjale, mis puutub nende joontega.
Solenoidi jaoks see on sõnastatud järgmiselt: Kui paned solenoidi parema käe peopesaga kinni nii, et neli sõrme on pöördetel suunatud piki voolu, siis sirutatud pöial näitab solenoidi sees olevate magnetvälja joonte suunda.
Voolu jaoks magnetväljas liikuvas juhis
Parema käe reegel: Kui parema käe peopesa on paigutatud nii, et magnetvälja jooned sisenevad sellesse ja painutatud pöial on suunatud piki juhi liikumist, näitavad neli välja sirutatud sõrme induktsioonvoolu suunda.
11. klassi füüsikas (Kasjanov V.A., 2002),
ülesanne №32
peatükki " Magnetism. Magnetväli. PÕHIPUNKTID».
Magnetilise induktsiooni vektor
Elektrivoolul on magnetiline toime.Seega tekib liikuvate laengute toimel magnetväli.
Magnetilise induktsiooni vektor- vektorfüüsikaline suurus, mille suund antud punktis ühtib vaba magnetnõela põhjapooluse antud punktiga näidatud suunaga.
Magnetinduktsiooni vektori moodul- füüsikaline suurus, mis on võrdne vooluga juhi segmendile magnetväljast mõjuva maksimaalse jõu suhtega voolutugevuse ja juhi segmendi pikkuse korrutisesse:
Magnetinduktsiooni ühikuks on tesla (1 tesla).
Gimleti reegel alalisvoolu jaoks: kui kruvid juhtme voolu suunas, siis langeb selle käepideme otsa liikumiskiiruse suund kokku magnetinduktsiooni vektori suunaga selles punktis.
Parema käe reegel pärivoolu jaoks: kui haarata juhist parema käega, suunates painutatud pöidla mööda voolu, siis ülejäänud sõrmede otsad antud punktis näitavad induktsioonivektori suunda selles punktis.
Magnetväljade superpositsiooni põhimõte: tekkiv magnetinduktsioon antud punktis on selles punktis erinevate voolude poolt tekitatud magnetinduktsiooni vektorite summa:
Gimleti reegel vooluga mähise jaoks (silmusvool): kui keerate gimleti käepidet mähises oleva voolu suunas, siis kattub gimleti translatsiooniline liikumine poolis oleva voolu tekitatud magnetilise induktsiooni vektori suunaga oma teljel.
Magnetilised induktsiooniliinid- sirged, mille puutujad igas punktis langevad kokku magnetinduktsiooni vektori suunaga. Magnetilised induktsiooniliinid on alati suletud: neil pole algust ega lõppu. Magnetväli on keerisväli, st suletud magnetilise induktsiooni joontega väli
Magnetvoog (magnetilise induktsiooni voog) läbi teatud ala pinna - füüsikaline suurus, mis on võrdne magnetinduktsiooni vektori ja pindalavektori skalaarkorrutisega:
 Magnetvoo ühik on weber (1 Wb) 1 Wb = 1 T.m 2.
Magnetvoo ühik on weber (1 Wb) 1 Wb = 1 T.m 2.
Ampere'i seadus: jõud, millega magnetväli mõjub juhi segmendile, millesse on paigutatud vool, võrdub voolutugevuse, magnetinduktsiooni, juhi segmendi pikkuse ja voolusuundade vahelise nurga siinuse korrutisega ja magnetilise induktsiooni vektor:
 Ühtlases magnetväljas kipub suletud ahel end kehtestama nii, et tema enda induktsiooni suund langeb kokku välise induktsiooni suunaga.
Ühtlases magnetväljas kipub suletud ahel end kehtestama nii, et tema enda induktsiooni suund langeb kokku välise induktsiooni suunaga.
Lorentzi jõud- magnetväljast B kiirusega v liikuvale laetud osakesele mõjuv jõud:
 kus q on osakeste laeng ning nurk osakeste kiiruse ja magnetvälja induktsiooni vahel.
kus q on osakeste laeng ning nurk osakeste kiiruse ja magnetvälja induktsiooni vahel.
Lorentzi jõu suund määrab vasaku käe reegel: kui vasak käsi on paigutatud nii, et neli välja sirutatud sõrme näitavad positiivse laengu kiiruse suunda (või vastupidiselt negatiivse laengu kiirusele) ja magnetinduktsiooni vektor siseneb peopessa, siis pöial on painutatud ( peopesa tasapind) 90° võrra näitab antud laengule mõjuva jõu suunda.
Laetud osake, mis lendab magnetilise induktsiooni joontega paralleelsesse ühtlasesse magnetvälja, liigub ühtlaselt mööda neid jooni. Magnetinduktsiooni joontega risti asetseval tasapinnal ühtlasesse magnetvälja lendav laetud osake liigub sellel tasapinnal ringikujuliselt. Paralleelselt paiknevad juhid, mille kaudu voolavad voolud ühes suunas, tõmbavad ligi, vastassuundades aga tõrjuvad. Magnetväljad, mille tekitavad voolud I 1 , I 2, mis voolavad läbi lõpmata pikkade paralleelsete juhtide, mis asuvad üksteisest kaugusel r, viivad vastasmõjujõu ilmnemiseni igale juhtme pikkusega Δl lõigule.
 kus k m on proportsionaalsuskoefitsient, k m = 2 10 -7 N/A 2
kus k m on proportsionaalsuskoefitsient, k m = 2 10 -7 N/A 2
Voolu ühikuks on amper (1 A) Alalisvool on 1 A, kui vool läbib kahte paralleelset lõpmatu pikkusega ja tühise ümmarguse ristlõikepindalaga juhti, mis asuvad vaakumis üksteisest 1 m kaugusel. , põhjustab juhtme pikkuse 1 m vastastikjõu segmendi, mis on võrdne 2 10 -7 N
Magnetvälja induktsioon väheneb vooluga juhi kauguse suurenedes Juhtide interaktsioon vooluga on juhtides liikuvate laengute magnetilise vastastikmõju tagajärg Magnetjõu mõjul erinevalt vastassuunas paralleelselt liikuvatest laengutest tõmbuvad endasse ja nagu laengud tõrjuvad
Silmuse induktiivsus(või iseinduktsiooni koefitsient) - füüsikaline suurus, mis võrdub juhi kontuuriga piiratud ala läbiva magnetvoo ja voolutugevuse vahelise proportsionaalsuse koefitsiendiga. Induktiivsuse ühik - henry (1 H)
magnetvälja energia, loodud voolu I vooluga läbi induktiivsusega L juhi on võrdne

Söötme magnetiline läbilaskvus- füüsikaline suurus, mis näitab, mitu korda erineb magnetvälja induktsioon homogeenses keskkonnas välise (magnetiseeriva) välja magnetilisest induktsioonist vaakumis.
 Diamagnetid, paramagnetid, ferromagnetid- järsult erinevate magnetiliste omadustega ainete põhiklassid
Diamagnetid, paramagnetid, ferromagnetid- järsult erinevate magnetiliste omadustega ainete põhiklassid
Diamagnetiline- aine, mille väline magnetväli on veidi nõrgenenud (μ<= 1)
Paramagnetiline aine, mille väline magnetväli on veidi võimendatud (μ >= 1)
Ferromagnetiline- aine, mille väline magnetväli on oluliselt võimendatud (μ >> 1)
Magnetiseerimiskõver- enda magnetinduktsiooni sõltuvus välise magnetvälja induktsioonist
Sunnijõud- proovi demagnetiseerimiseks vajaliku välisvälja magnetiline induktsioon
Magnetiliselt kõvad ferromagnetid- suure jääkmagnetiseeringuga ferromagnetid Pehmed magnetilised ferromagnetid- madala jääkmagnetiseeritusega ferromagnetid Hüstereesi silmus- ferromagneti magnetiseerimise ja demagnetiseerimise suletud kõver Curie temperatuur- kriitiline temperatuur, millest kõrgemal toimub aine üleminek ferromagnetilisest olekust paramagnetiliseks

Katse
Voolu kandev juht on magnetvälja allikas.
Kui voolu kandev juht asetatakse välisesse magnetvälja,
siis mõjub see juhile amprijõuga.
Ampere võimsus - see on jõud, millega magnetväli mõjub sellesse asetatud voolu juhtivale juhile.

Andre Marie Ampere
Eksperimentaalselt uuriti magnetvälja mõju voolu juhtivale juhile
André Marie Ampère (1820).
Muutes juhtmete kuju ja asukohta magnetväljas, suutis Amper määrata vooluga (vooluelemendi) eraldi juhi lõigule mõjuva jõu. Tema auks
seda jõudu nimetati Ampere jõuks.

– Ampere võimsus
Katseandmetel jõumoodul F :
võrdeline juhi pikkusega l asub magnetväljas;
võrdeline magnetvälja induktsiooni mooduliga B ;
võrdeline juhi vooluga I ;
sõltub juhi orientatsioonist magnetväljas, st. nurgast α voolu suuna ja magnetvälja induktsioonivektori vahel B ⃗ .

Ampere toitemoodul
Amperjõu moodul on võrdne magnetvälja induktsioonimooduli korrutisega B ,
milles on voolu kandev juht,
selle juhi pikkus l , voolutugevus I selles ning voolu suundade ja magnetvälja induktsioonivektori vahelise nurga siinus

Suund
Amperjõud
Määratakse kindlaks amprijõu suund
reegli järgi vasakule käed:
kui paned oma vasaku käe
nii et siseneb magnetvälja induktsioonivektor (B⃗).
peopesas neli välja sirutatud
sõrmed näitasid suunda
voolu (I), siis 90° painutatud pöial näitab amprijõu (F⃗ A) suunda.

Kahe koostoime
voolu juhtivad juhid
Voolu kandev juht loob enda ümber magnetvälja,
sellele väljale asetatakse teine voolujuht,
mis tähendab, et sellele mõjub amprijõud

Tegevus
magnetväli
vooluga raamil
Raamile mõjub paar jõudu, mis paneb selle pöörlema.
- Jõuvektori suund määratakse vasaku käe reegliga.
- F=B I l sinα=ma
- M = F d = B I S sinα- V pöördemoment

Elektriline mõõtmine
seadmeid
Magnetoelektriline süsteem
Elektromagnetiline süsteem
Interaktsioon
pooli magnetväli
terasest südamikuga
Interaktsioon
vooluraamid ja magnetväljad

Rakendus
Amperjõud
Tehnikas kasutatakse laialdaselt magnetväljas voolu juhtivale juhile mõjuvaid jõude. Elektrimootorid ja generaatorid, seadmed heli salvestamiseks magnetofonides, telefonid ja mikrofonid – kõik need ja paljud teised instrumendid ja seadmed kasutavad voolude, voolude ja magnetite koostoimet.


Ülesanne
0,5 m pikkune sirge juht, mida läbib 6 A vool, on ühtlases magnetväljas. Magnetinduktsiooni vektori moodul 0,2 T, juht asub nurga all
vektorile IN .
Juhile küljelt mõjuv jõud
magnetväli on võrdne
Vastus: 0,3 N
Vastus
Lahendus.
Avaldise abil määratakse magnetväljast voolu juhtivale juhile mõjuv amprijõud
Õige vastus: 0,3 N
Lahendus

Näited:
- meile

Ilma vihjeta
- meilt
Rakendage vasaku käe reeglit joonisele fig. nr 1,2,3,4.
Joonis nr 3
Joonis nr 2
Joonis nr 4
Joonis nr 1
Kus see asub? N poolus joonisel fig. 5,6,7?
Joonis nr 7
Joonis #5
Joonis #6

Interneti-ressursid
http://fizmat.by/kursy/magnetizm/sila_Ampera
http://www.physbook.ru/index.php/SA._%D0%A1%D0%B8%D0%BB%D0%B0_%D0%90%D0%BC%D0%BF%D0%B5% D1%80%D0%B0
http://class-fizika.narod.ru/10_15.htm
http://www.physics.ru/courses/op25part2/content/chapter1/section/paragraph16/theory.html#.VNoh5iz4uFg
http://www.eduspb.com/node/1775
http://www.ispring.ru
Gimleti reegel on kahe vektori õige korrutamise lihtsustatud ühe käega visuaalne demonstratsioon. Koolikursuse geomeetria nõuab, et õpilased oleksid teadlikud skalaarkorrutisest. Füüsikas kohtab vektorit sageli.
Vektori kontseptsioon
Usume, et vektori definitsiooni tundmise puudumisel ei ole mõtet gimleti reeglit tõlgendada. Peate pudeli avama - teadmised õigete toimingute kohta aitavad. Vektor on matemaatiline abstraktsioon, mida tegelikult ei eksisteeri ja millel on järgmised omadused:
- Suunatud segment, mida tähistab nool.
- Algpunktiks saab vektori poolt kirjeldatud jõu mõjupunkt.
- Vektori pikkus võrdub jõu, välja ja muude kirjeldatud suuruste mooduliga.
Tugevus ei ole alati kaasas. Vektorid kirjeldavad välja. Kõige lihtsamat näidet näitavad koolinoortele füüsikaõpetajad. Peame silmas magnetvälja tugevuse jooni. Vektorid joonistatakse tavaliselt tangentsiaalselt mööda. Voolu kandval juhil toimuva tegevuse illustratsioonidel näete sirgeid jooni.
Gimleti reegel
Vektorsuurustel pole sageli rakenduskohta, tegevuskeskused valitakse kokkuleppel. Jõumoment tuleb õla teljest. Vajalik lisamise lihtsustamiseks. Oletame, et erineva pikkusega hoobadele mõjuvad ühise teljega õlgadele ebavõrdsed jõud. Momentide lihtsa liitmise ja lahutamisega leiame tulemuse.
Vektorid aitavad lahendada paljusid igapäevaseid probleeme ja kuigi nad toimivad matemaatiliste abstraktsioonidena, toimivad nad tegelikkuses. Mitmete mustrite põhjal on võimalik ennustada objekti tulevast käitumist, mis on võrdne skalaarsuurustega: populatsiooni suurus, ümbritseva õhu temperatuur. Ökolooge huvitavad lindude lennusuunad ja -kiirus. Nihe on vektorsuurus.
Gimleti reegel aitab leida vektorite ristkorrutist. See ei ole tautoloogia. See on lihtsalt see, et tegevuse tulemus on ka vektor. Kinnitusreegel kirjeldab suunda, kuhu nool osutab. Mis puutub moodulisse, siis peate rakendama valemeid. Gimleti reegel on keerulise matemaatilise tehte lihtsustatud puhtkvalitatiivne abstraktsioon.
Analüütiline geomeetria ruumis
Kõik teavad probleemi: jõe ühel kaldal seistes määrake jõesängi laius. See tundub mõistusele arusaamatu, seda saab kiiresti lahendada kõige lihtsama geomeetria meetoditega, mida koolilapsed õpivad. Teeme mitu lihtsat sammu:
- Märkige vastaskaldal silmapaistev maamärk, kujuteldav punkt: puutüvi, oja suubuv ojasuu.
- Vastaskalda joonega täisnurga all tehke siiapoole jõesängi sälk.
- Leia koht, kust maamärk on kalda suhtes 45 kraadise nurga all nähtav.
- Jõe laius võrdub lõpp-punkti kaugusega ristmikust.

Jõe laiuse määramine kolmnurga sarnasuse meetodil
Kasutame nurga puutujat. Ei pea olema 45 kraadi. Vaja on suuremat täpsust – parem on võtta terav nurk. Lihtsalt 45 kraadi puutuja on võrdne ühega, ülesande lahendus on lihtsustatud.
Sarnaselt on võimalik leida vastuseid põletavatele küsimustele. Isegi mikrokosmoses, mida juhivad elektronid. Ühte võib öelda ühemõtteliselt: asjasse mittepöörduvale inimesele tunduvad gimleti reegel ja vektorite vektorkorrutis igav ja igav. Mugav tööriist, mis aitab mõista paljusid protsesse. Enamikku huvitab elektrimootori tööpõhimõte (olenemata konstruktsioonist). Seda saab hõlpsasti seletada vasaku käe reegli abil.
Paljudes teadusharudes käivad kaks reeglit kõrvuti: vasak, parem käsi. Vektorkorrutist võib mõnikord kirjeldada nii või naa. See kõlab ebamääraselt, kuid vaatame kohe näidet:
- Oletame, et elektron liigub. Negatiivselt laetud osake liigub läbi konstantse magnetvälja. Ilmselgelt on trajektoor Lorentzi jõu tõttu kõver. Skeptikud vaidlevad vastu, et mõnede teadlaste sõnul pole elektron osake, vaid pigem väljade superpositsioon. Heisenbergi määramatuse printsiipi vaatame aga mõni teine kord. Seega elektron liigub:
Olles asetanud parema käe nii, et magnetvälja vektor siseneb peopessa risti, näitavad välja sirutatud sõrmed osakese lennusuunda, 90 kraadi küljele painutatud pöial ulatub jõu suunas. Parema käe reegel, mis on veel üks väljend reeglist. Sünonüümsed sõnad. See kõlab erinevalt, kuid sisuliselt on see sama.

- Tsiteerime Vikipeediast üht veidruse järgi lõhnavat fraasi. Peeglis peegeldudes muutub vektorite parem kolmik vasakpoolseks, siis tuleb parema käe asemel rakendada vasaku käe reeglit. Elektron lendas ühes suunas, kuid füüsikas kasutusele võetud meetodite järgi liigub vool vastupidises suunas. Justkui peegeldub peeglist, mistõttu Lorentzi jõud määratakse vasaku käe reegliga:
Kui asetate vasaku käe nii, et magnetvälja vektor siseneb peopessa risti, näitavad välja sirutatud sõrmed elektrivoolu voolu suunda ja 90 kraadi küljele painutatud pöial ulatub välja, näidates jõu vektorit.
Näete, olukorrad on sarnased, reeglid on lihtsad. Kuidas meeles pidada, millist kasutada? Määramatuse põhiprintsiip füüsikas. Ristkorrutis arvutatakse paljudel juhtudel ja kehtib üks reegel.
Millist reeglit rakendada
Sünonüümsõnad: käsi, kruvi, klapp
Esiteks, vaatame sünonüümsõnu, paljud hakkasid endalt küsima: kui siinne narratiiv peaks puudutama klambrit, siis miks puudutab tekst pidevalt käsi. Tutvustame õige kolmiku mõistet, õiget koordinaatsüsteemi. Kokku, 5 sünonüümset sõna.
Oli vaja välja selgitada vektorite vektorkorrutis, kuid selgus, et koolis seda ei õpetata. Teeme uudishimulikele kooliõpilastele olukorra selgeks.

Descartes'i koordinaatsüsteem
Tahvlil olevad kooligraafikud on joonistatud Descartes'i X-Y koordinaatsüsteemis. Horisontaalne telg (positiivne osa) osutab paremale - loodetavasti on vertikaaltelg ülespoole. Astume ühe sammu ja saame õige kolm. Kujutage ette: Z-telg vaatab algpunktist klassiruumi, nüüd teavad õpilased vektorite parempoolse kolmiku definitsiooni.
Wikipedia ütleb: on lubatud võtta vasakpoolsed kolmikud, kuid parempoolsed ei nõustu vektorkorrutise arvutamisega. Usmanov on selles osas kategooriline. Aleksander Jevgenievitši loal anname täpse määratluse: vektorite vektorkorrutis on vektor, mis vastab kolmele tingimusele:
- Korrutise moodul on võrdne algvektorite moodulite ja nendevahelise nurga siinuse korrutisega.
- Tulemusvektor on algsete vektoriga risti (need kaks moodustavad tasapinna).
- Kolm vektorit (konteksti järgi mainimise järjekorras) on õiged.
Me teame kolme õiget. Seega, kui X-telg on esimene vektor, Y on teine, on tulemus Z. Miks seda õigeks kolmeks nimetati? Ilmselt on see ühendatud kruvide ja klambritega. Kui keerate kujuteldavat rõngast mööda lühimat teed esimese vektori ja teise vektori vahel, hakkab lõiketööriista telje translatsiooniline liikumine toimuma saadud vektori suunas:
- Kinnitusreegel kehtib kahe vektori korrutisele.
- Kinnitusreegel näitab kvalitatiivselt selle toimingu tulemuseks oleva vektori suunda. Kvantitatiivselt leitakse pikkus mainitud avaldise abil (vektorite absoluutväärtuste ja nendevahelise nurga siinuse korrutis).
Nüüd saavad kõik aru: Lorentzi jõud leitakse vasakukäelise niidiga võlli reegli järgi. Vektorid on kokku pandud vasakukäeliseks kolmikuks, kui need on üksteisega ortogonaalsed (risti üksteisega), moodustub vasakpoolne koordinaatsüsteem. Tahvlil näitaks Z-telg vaate suunas (publikust eemale ja seina taha).
Lihtsad nipid kerereeglite meeldejätmiseks
Inimesed unustavad, et Lorentzi jõudu on lihtsam määrata vasakukäelise kere reegli abil. Kes tahab elektrimootori tööpõhimõttest aru saada, peab selliseid mutreid kaks korda kõvemini purustama. Sõltuvalt konstruktsioonist võib rootori poolide arv olla märkimisväärne või vooluahel degenereerub, muutudes oravapuuriks. Teadmiste otsijaid aitab Lorentzi reegel, mis kirjeldab magnetvälja, kus vaskjuhid liiguvad.
Meenutamiseks kujutame ette protsessi füüsikat. Oletame, et elektron liigub väljas. Jõu suuna leidmiseks rakendatakse parema käe reeglit. On tõestatud, et osake kannab negatiivset laengut. Juhile mõjuva jõu suund määratakse vasaku käe reegli järgi, pidage meeles: füüsikud võtsid täiesti vasakpoolsetest allikatest, et elektrivool liigub vastupidises suunas, kuhu elektronid läksid. Ja see on vale. Seetõttu peame rakendama vasaku käe reeglit.
Alati ei pea selliseid metsikuid läbi elama. Näib, et reeglid on segasemad, kuid mitte täiesti tõesed. Parema käe reeglit kasutatakse sageli nurkkiiruse arvutamiseks, mis on kiirenduse ja raadiuse geomeetriline korrutis: V = ω x r. Visuaalne mälu aitab paljusid:
- Ringjoone raadiuse vektor on suunatud tsentrist ringile.
- Kui kiirendusvektor on suunatud ülespoole, liigub keha vastupäeva.
Vaata, siin kehtib jällegi parema käe reegel: kui asetad peopesa nii, et kiirendusvektor siseneb peopessa risti, sirutage sõrmed raadiuse suunas, siis 90 kraadi kõverdatud pöial näitab peopesa liikumissuunda. objekti. Piisab, kui joonistate selle korra paberile ja mäletate seda vähemalt pool oma elust. Pilt on tõesti lihtne. Te ei pea enam füüsikatunnis oma ajusid rabelema lihtsa küsimuse üle: nurkkiirenduse vektori suund.
Jõumoment määratakse sarnasel viisil. Lähtub õla teljest risti, langeb kokku nurkkiirenduse suunaga ülalkirjeldatud joonisel. Paljud küsivad: miks see vajalik on? Miks ei ole jõumoment skalaarsuurus? Miks suund? Keerulistes süsteemides ei ole interaktsioonide jälgimine lihtne. Kui telgi ja jõude on palju, aitab momentide vektorliitmine. Arvutusi saab oluliselt lihtsustada.